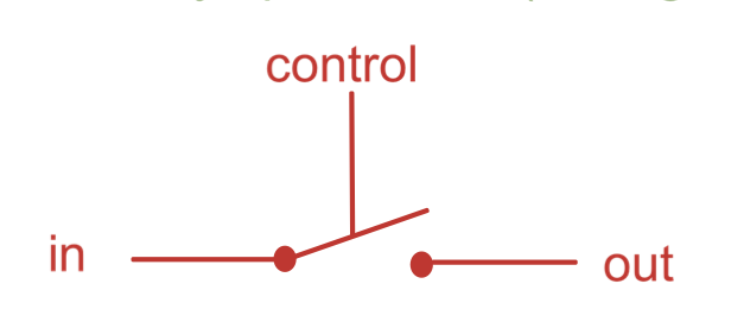
| input | output | |
|---|---|---|
| in | control | out |
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
| control | |||
|---|---|---|---|
| 0 | 1 | ||
| in | 0 | 0 | 0 |
| 1 | 0 | 1 | |
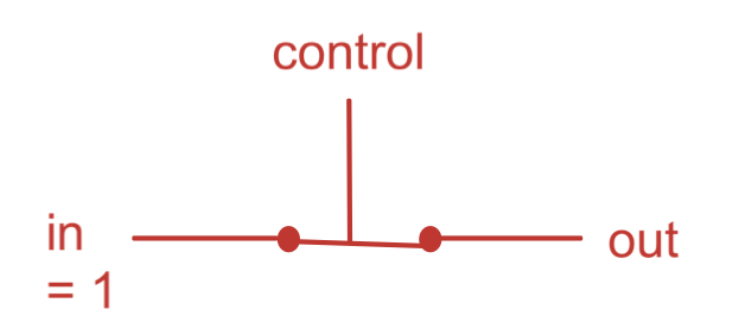
| input | output | |
|---|---|---|
| in | control | out |
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
| control | |||
|---|---|---|---|
| 0 | 1 | ||
| in | 0 | 0 | 0 |
| 1 | 0 | 1 | |
Can be used to implement an AND gate.
| input | output | |
|---|---|---|
| in | control | out |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
| input | output | |
|---|---|---|
| in | control | out |
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
If we provide constant input, so the output becomes a function of the "control" only, this can be used to implement a NOT gate.
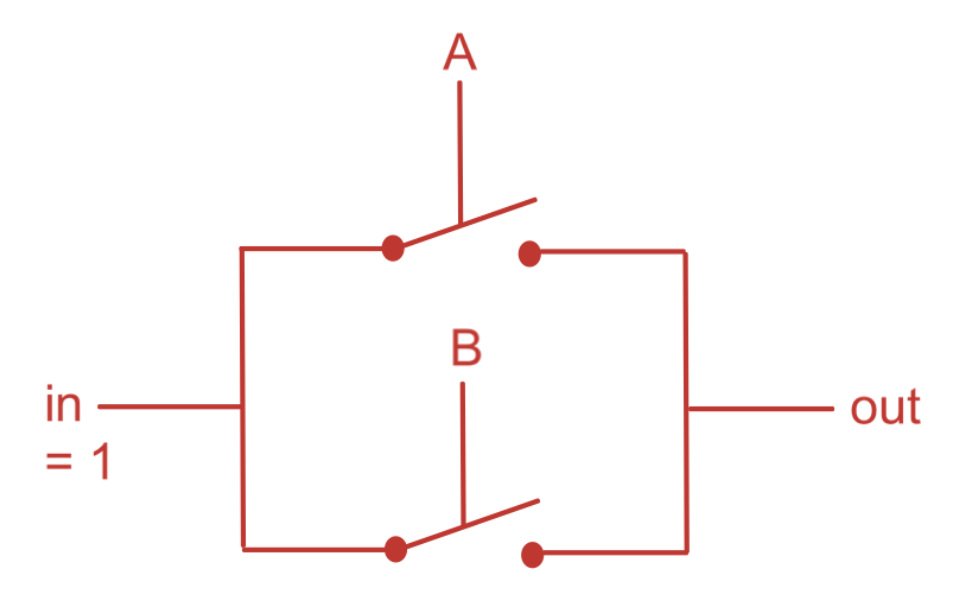
| input | output | ||
|---|---|---|---|
| in | A | B | out |
| 1 | 0 | 0 | 0 |
| 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 |